Peking University, Nov. 15, 2019: Recently, the research team led by Professor Xie Guangming from College of Engineering at Peking University has made new progress in formation control of multi-agent systems. The research paper was published in the leading journal in the field of systems and control, the IEEE Transactions on Automatic Control as full paper.
Coordination of multi-agent systems is one of the most actively studied topics in the field of systems and control. Professor Xie Guangming’s group has rich experiences and has contributed several novel advances in this topic. Their research emphasizes the application in the cooperative control of mobile robots. Recently, Professor Xie's group investigated the formation control problems in multi-agent systems and has achieved new progress, including the deeply theoretical results and a variety of experimental results on their self-developed multiple underwater robots and multiple UAVs.
Professor Xie's group proposed a limit-cycle based controller design approach for a group of anonymous mobile agents to form any desired formations in a plane. Their proposed controller is comprised of two parts, where a limit cycle oscillator named a converging part is designed to make each agent keep a desired distance to the static/moving target as well as rotating counterclockwise/clockwise around or remaining static relative to the target as required, while a layout part is introduced to make each agent maintain a desired distance to its two neighbors. One key merit of the controller is that it can be implemented by each agent in its local frame so that only local information is utilized without knowing global information. Besides, no collision between agents ever takes place throughout the system’s evolution. These advantages make their controller be easily applied to real robot systems. Based on this, Professor Xie's group successfully performed formation control experiments on their self-developed multiple underwater robots and multiple UAVs, respectively.
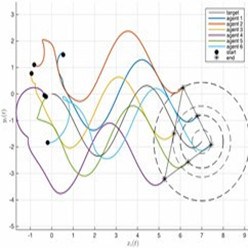
(a)Simulation.

(b)Experiments on multiple UAVs.

(c)Experiments on multiple robotic fish.
The theoretical part of this work has been published in the IEEE Transactions on Automatic and Control as Full Paper (C. Wang, W. Xia, G. Xie, Limit-cycle-based design of formation control for mobile agents, IEEE Transactions on Automatic Control, DOI: 10.1109/TAC.2019.2946338.).
The corresponding author of the paper is Professor Xie Guangming. The first author is Dr. Wang Chen in Professor Xie's group, and she is also a Research Assistant Professor in the National Engineering Research Center for Software Engineering, Peking University. This project is supported financially by the National Natural Science Foundation of China (NSFC). The collaborator of the project is Professor Xia Weiguo at Dalian University of Technology.
Edited by: Huang Weijian
Source: College of Engineering, Peking University









